从全连接到卷积
全连接层主要存在以下问题:
在使用全连接层处理图像数据时,需要先将图像展平为1维数组,然后再对进行相关的计算,这样做忽略了每个图像的空间结构信息。
全连接层需要将上下两层的神经元全部相连接,这样会导致参数量非常多。举个例子:图像大小是$100\times100$的图像,再输入隐藏层神经元数量为50的网络中时,产生的权重参数量为$100\times100\times50=500\enspace000$
卷积操作主要有以下两个特性:
- 平移不变性:不够检测对象出现再图像中的哪个位置,神经网络的前面几层应该对相同的图像区域具有相似的反应,即为“平移不变性”。
- 局部性:神经网络的前面几层应该只探索输入图像中的局部区域,而不过度在意图像中相隔较远的区域的关系,这就是“局部性”原则。最终,可以聚合这些局部特征,以在整个图像级别进行预测。
图像卷积
互相关运算
严格来说,卷积层是个错误的叫法,因为它所表达的运算其实是互相关运算,而不是卷积运算。
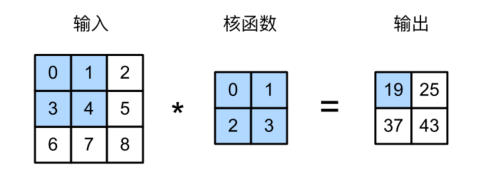
输出特征图的大小为$(n_h-k_h+1)\times(n_w-k_w+1)$
其中:
- $n_h$为原始图像高度
- $n_w$为原始图像宽度
- $k_h$为卷积核高度
- $k_w$为卷积核宽度
1 | import torch |
1 | def corr2d(X, K): #@save |
1 | X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]]) |
tensor([[19., 25.],
[37., 43.]])
卷积层
基于上面定义的corr2d函数实现二维卷积层。在__init__构造函数中,将weight和bias声明为两个模型参数,前向传播函数调用corr2d函数并添加偏置。
1 | class Conv2D(nn.Module): |
使用$2\times2$的卷积核对$X$进行卷积
1 | Conv2D((2, 2))(X) |
tensor([[2.8595, 4.4158],
[7.5284, 9.0847]], grad_fn=<AddBackward0>)
图像中的边缘检测
首先我们构造一个6$\times$8像素的黑白图像。中间四列为黑色(0),其余像素为白色(1)。
1 | X = torch.ones((6, 8)) |
tensor([[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.],
[1., 1., 0., 0., 0., 0., 1., 1.]])
接下来我们构造一个高度为1,宽度为2的卷积核
1 | K = torch.tensor([[1.0, -1.0]]) |
1 | Y = corr2d(X, K) |
tensor([[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.],
[ 0., 1., 0., 0., 0., -1., 0.]])
其中1代表从白色到黑色的边缘,-1代表从黑色到白色的边缘
接下来将图像进行转置,再次使用上方的卷积核K进行边缘检测
1 | corr2d(X.t(), K) |
tensor([[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.],
[0., 0., 0., 0., 0.]])
我们发现卷积核K只能够检测出垂直边缘,水平边缘无法检测到。
学习卷积核
如果我们只需寻找黑白边缘,那么以上$[1, -1]$的边缘检测器足以。然而,当有了更复杂数值的卷积核,或者连续的卷积层时,我们不可能手动设计滤波器。那么我们是否可以学习由X生成Y的卷积核呢?
现在让我们看看是否可以通过仅查看“输入-输出”对来学习由X生成Y的卷积核。我们先构造⼀个卷积层,并将其卷积核初始化为随机张量。接下来,在每次迭代中,我们⽐较Y与卷积层输出的平⽅误差,然后计算梯度来更新卷积核。为了简单起⻅,我们在此使⽤内置的⼆维卷积层,并忽略偏置。
1 | # 构造一个二维卷积层,它具有1个输出通道和形状为(1, 2)的卷积核 |
epoch2, loss1.894
epoch4, loss0.345
epoch6, loss0.069
epoch8, loss0.016
epoch10, loss0.005
在迭代10此后,误差已经足够低了。看看训练效果
1 | conv2d.weight.data.reshape((1, 2)) |
tensor([[ 0.9989, -0.9873]])
发现得到的结果十分接近前面的卷积核K
填充和步幅
假设以下情景:有时,在应⽤了连续的卷积之后,我们最终得到的输出远⼩于输⼊⼤⼩。这是由于卷积核的宽度和⾼度通常⼤于1所导致的。⽐如,⼀个240×240像素的图像,经过10层5×5的卷积后,将减少到200×200像素。如此⼀来,原始图像的边界丢失了许多有⽤信息。⽽填充是解决此问题最有效的⽅法。有时,我们可能希望⼤幅降低图像的宽度和⾼度。例如,如果我们发现原始的输⼊分辨率⼗分冗余。步幅则可以在这类情况下提供帮助。
填充(padding)
在应⽤多层卷积时,我们常常丢失边缘像素。由于我们通常使⽤⼩卷积核,因此对于任何单个卷积,我们可能只会丢失⼏个像素。但随着我们应⽤许多连续卷积层,累积丢失的像素数就多了。
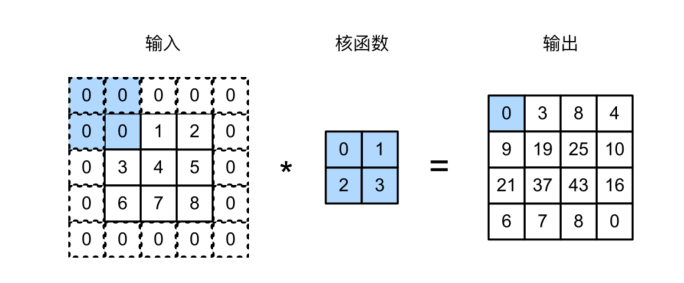
解决这个问题的⽅法为填充(padding):在输⼊图像的边界填充元素(通常填充元素是0)。
我们将3×3输⼊填充到5×5,那么它的输出就增加为4×4。阴影部分是第⼀个输出元素以及⽤于输出计算的输⼊和核张量元素:0×0+0×1+0×2+0×3=0。
通常,如果我们添加$p_h$行填充(大约一半在顶部,一半在底部)和$p_w$列填充(左侧大约一半,右侧一半),则输出形状将为
这意味着输出的高度和宽度将分别增加$p_h$和$p_w$
在许多情况下,我们需要设置$p_h=k_h-1$和$p_w=k_w-1$,使输入和输出具有相同的高度和宽度。这样可以在构建网络时更容易地预测每个图层的输出形状。假设$k_h$是奇数,我们将在高度的两侧填充$p_h/2$行。如果$k_h$是偶数,则一种可能性是在输入顶部填充$(p_h+1)/2$行,在底部填充$(p_h-1)/2$行。同理,我们填充宽度的两侧。
卷积神经⽹络中卷积核的⾼度和宽度通常为奇数,例如1、3、5或7。选择奇数的好处是,保持空间维度的同时,我们可以在顶部和底部填充相同数量的⾏,在左侧和右侧填充相同数量的列。
1 | import torch |
1 | # 请注意,这⾥每边都填充了1⾏或1列,因此总共添加了2⾏或2列 |
torch.Size([8, 8])
发现当卷积核大小设置为(3, 3)时,padding设置为1时,能够保留原始的输入图像维度
当卷积核高度和宽度不同时,我们要想保留原始图像的维度,padding在行和列的填充上也应该不一样。例如,我们使用高度为5,宽度为3的卷积核,高度和宽度两边的填充分别为2和1.
计算方法$\frac{5-1}{2}=2$, $\frac{3-1}{2}=1$
1 | conv2d = nn.Conv2d(1, 1, kernel_size=(5, 3), padding=(2, 1)) |
torch.Size([8, 8])
步幅
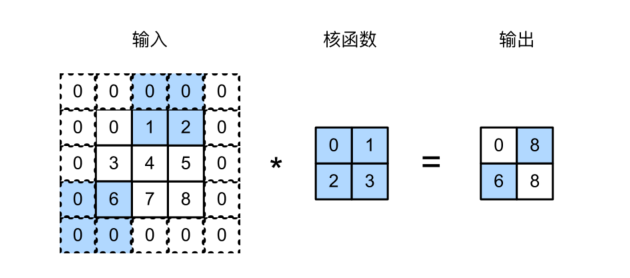
在计算互相关时,卷积窗⼝从输⼊张量的左上⻆开始,向下、向右滑动。在前⾯的例⼦中,我们默认每次滑动⼀个元素。但是,有时候为了⾼效计算或是缩减采样次数,卷积窗⼝可以跳过中间位置,每次滑动多个元素。
我们将每次滑动元素的数量称为步幅(stride)。
下图是垂直步幅为3,⽔平步幅为2的⼆维互相关运算。
通常,当垂直步幅为$s_h$、⽔平步幅为$s_w$时,输出形状为
如果我们设置了$p_h=k_h-1$和$p_w=k_w-1$,则输出形状将简化为
更进一步,如果输入的高度和宽度可以被垂直和水平步幅整除,则输出形状将为
下面,我们将高度和宽度的步幅设置为2,从而将输入的高度和宽度减半
1 | conv2d = nn.Conv2d(1, 1, kernel_size=3, padding=1, stride=2) |
torch.Size([4, 4])
接下来看一个稍微复杂一点的例子
1 | conv2d = nn.Conv2d(1, 1, kernel_size=(3, 5), padding=(0, 1), stride=(3, 4)) |
torch.Size([2, 2])
说明:
- 当输⼊高度和宽度两侧的填充数量分别为$p_h$和$p_w$时,我们称之为填充$(p_h, p_w)$。当$p_h=p_w=p$时,填充是p。
- 当高度和宽度上步幅分别为$s_h$和$s_w$时,我们称之为步幅(s_h, s_w)。当时的步幅为$s_h=s_w=s$时,步幅为s。
默认情况下,填充为0,步幅为1。在实践中,我们很少使用不一致的步幅或填充,也就是说,我们通常有$p_h=p_w$和$s_h=s_w$。
多输入多输出通道
多输入通道
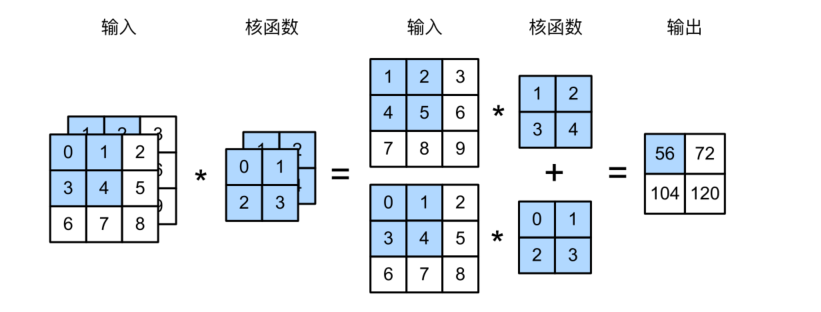
当输⼊包含多个通道时,需要构造⼀个与输⼊数据具有相同输⼊通道数的卷积核,以便与输⼊数据进⾏互相关运算。
1 | def corr2d_multi_in(X, K): |
1 | X = torch.tensor([[[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]], |
tensor([[ 56., 72.],
[104., 120.]])
多输出通道
到⽬前为⽌,不论有多少输⼊通道,我们还只有⼀个输出通道。
在最流⾏的神经⽹络架构中,随着神经⽹络层数的加深,我们常会增加输出通道的维数,通过减少空间分辨率以获得更⼤的通道深度。直观地说,我们可以将每个通道看作是对不同特征的响应。⽽现实可能更为复杂⼀些,因为每个通道不是独⽴学习的,⽽是为了共同使⽤⽽优化的。
因此,多输出通道并不仅是学习多个单通道的检测器。
1 | def corr2d_multi_in_out(X, K): |
通过将核张量K与K+1(K中的每个元素加1)和K+2连接起来,构造一个具有3个输出通道的卷积核。
1 | K = torch.stack((K, K+1, K+2), 0) |
torch.Size([3, 2, 2, 2])
对输⼊张量X与卷积核张量K执⾏互相关运算。
1 | corr2d_multi_in_out(X, K) |
tensor([[[ 56., 72.],
[104., 120.]],
[[ 76., 100.],
[148., 172.]],
[[ 96., 128.],
[192., 224.]]])
可以看到第一个通道与之前的结果一致。
1$\times$1卷积层
$1\times1$卷积,即$k_h=k_w=1$,看起来似乎没有多大意义。毕竟卷积的本质是有效提取相邻像素间的相关特征,而$1\times1$卷积显然没有此作用。尽管如此,$1\times1$仍然十分流行,经常包含在复杂深层网络的设计中。
因为使用了最小窗口,$1\times1$卷积失去了卷积层的特有能力—在高度和宽度维度上,识别相邻元素互相作用的能力。其实$1\times1$卷积的唯一计算发生在通道上。
使⽤1×1卷积核与3个输⼊通道和2个输出通道的互相关计算。这⾥输⼊和输出具有相同的⾼度
和宽度,输出中的每个元素都是从输⼊图像中同⼀位置的元素的线性组合。我们可以将1×1卷积层看作是在每个像素位置应⽤的全连接层,以$c_i$个输⼊值转换为$c_o$个输出值。因为这仍然是⼀个卷积层,所以跨像素的权重是⼀致的。同时,1×1卷积层需要的权重维度为$c_o\times c_i$,再额外加上⼀个偏置。

1 | import torch |
1 | def corr2d_multi_in_out_1x1(X, K): |
1 | X = torch.normal(0, 1, (3, 3, 3)) |
1 | Y1 = corr2d_multi_in_out_1x1(X, K) |
torch.Size([2, 3, 3])
1 | Y2 = corr2d_multi_in_out(X, K) |
torch.Size([2, 3, 3])