汇聚层(Pooling)
通常当我们处理图像时,我们希望逐渐降低隐藏表⽰的空间分辨率、聚集信息,这样随着我们在神经⽹络中层叠的上升,每个神经元对其敏感的感受野(输⼊)就越⼤。
而我们的机器学习任务通常会跟全局图像的问题有关(例如,“图像是否包含⼀只猫呢?”),所以我们最后⼀层的神经元应该对整个输⼊的全局敏感。通过逐渐聚合信息,⽣成越来越粗糙的映射,最终实现学习全局表⽰的⽬标,同时将卷积图层的所有优势保留在中间层。
此外,当检测较底层的特征时(例如 6.2节中所讨论的边缘),我们通常希望这些特征保持某种程度上的平移不变性。例如,如果我们拍摄⿊⽩之间轮廓清晰的图像X,并将整个图像向右移动⼀个像素,即Z[i, j] = X[i, j + 1],则新图像Z的输出可能⼤不相同。⽽在现实中,随着拍摄⻆度的移动,任何物体⼏乎不可能发⽣在同⼀像素上。即使⽤三脚架拍摄⼀个静⽌的物体,由于快⻔的移动⽽引起的相机振动,可能会使所有物体左右移动⼀个像素(除了⾼端相机配备了特殊功能来解决这个问题)。
本节将介绍汇聚(pooling)层,有时候我们也称为池化层,它具有双重⽬的:
降低卷积层对位置的敏感性
降低对空间降采样表⽰的敏感性。
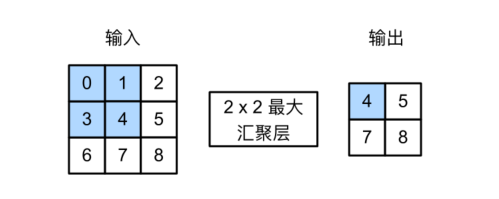
最大汇聚层和平均汇聚层
与互相关运算符⼀样,汇聚窗⼝从输⼊张量的左上⻆开始,从左往右、从上往下的在输⼊张量内滑动。在汇聚窗⼝到达的每个位置,它计算该窗⼝中输⼊⼦张量的最⼤值或平均值。计算最⼤值或平均值是取决于使⽤了最⼤汇聚层还是平均汇聚层。
1 | import torch |
1 | # 步长为1 |
1 | X = torch.tensor([[0.0, 1.0, 2.0], [3.0, 4.0, 5.0], [6.0, 7.0, 8.0]]) |
tensor([[4., 5.],
[7., 8.]])
平均汇聚层
1 | pool2d(X, (2, 2), 'avg') |
tensor([[2., 3.],
[5., 6.]])
填充和步幅
与卷积层⼀样,汇聚层也可以改变输出形状。和以前⼀样,我们可以通过填充和步幅以获得所需的输出形状。
1 | X = torch.arange(16, dtype=torch.float32).reshape((1, 1, 4, 4)) |
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]]]])
默认情况下。深度学习框架中的步幅与汇聚窗口的大小相同。因此,如果我们使用形状为(3, 3)的汇聚窗口,那么默认情况下,我们得到的步幅形状为(3, 3)。
1 | pool2d = nn.MaxPool2d(3) |
tensor([[[[10.]]]])
填充和步幅可以手动设定
1 | pool2d = nn.MaxPool2d(3, padding=1, stride=2) |
tensor([[[[ 5., 7.],
[13., 15.]]]])
可以设定一个任意大小的矩形汇聚窗口,并分别设定填充和步幅的高度和宽度。
1 | pool2d = nn.MaxPool2d((2, 3), stride=(2, 3), padding=(0, 1)) |
tensor([[[[ 5., 7.],
[13., 15.]]]])
多个通道
在处理多通道输⼊数据时,汇聚层在每个输⼊通道上单独运算,⽽不是像卷积层⼀样在通道上对输⼊进⾏汇总。这意味着汇聚层的输出通道数与输⼊通道数相同。下⾯,我们将在通道维度上连结张量X和X + 1,以构建具有2个通道的输⼊。
X四维度尺寸意义:(批量大小,通道数,高度, 宽度)
1 | X = torch.cat((X, X + 1), 1) |
tensor([[[[ 0., 1., 2., 3.],
[ 4., 5., 6., 7.],
[ 8., 9., 10., 11.],
[12., 13., 14., 15.]],
[[ 1., 2., 3., 4.],
[ 5., 6., 7., 8.],
[ 9., 10., 11., 12.],
[13., 14., 15., 16.]]]])
如下所示,汇聚后输出通道的数量仍然是2
1 | pool2d = nn.MaxPool2d(3, padding=1, stride=2) |
tensor([[[[ 5., 7.],
[13., 15.]],
[[ 6., 8.],
[14., 16.]]]])
卷积神经网络(LeNet)
通过之前⼏节,我们学习了构建⼀个完整卷积神经⽹络的所需组件。回想⼀下,之前我们将softmax回归模型和多层感知机模型应⽤于Fashion-MNIST数据集中的服装图⽚。为了能够应⽤softmax回归
和多层感知机,我们⾸先将每个⼤⼩为28 × 28的图像展平为⼀个784维的固定⻓度的⼀维向量,然后⽤全连接层对其进⾏处理。⽽现在,我们已经掌握了卷积层的处理⽅法,我们可以在图像中保留空间结构。同时,⽤卷积层代替全连接层的另⼀个好处是:模型更简洁、所需的参数更少。
LeNet,它是最早发布的卷积神经⽹络之⼀,因其在计算机视觉任务中的⾼效性能⽽受到⼴泛关注。这了模型是由$AT\&T$贝尔实验室的研究员$Yann LeCun$在1989年提出的(并以其命名),目的是识别图像中的手写数字。
当时,LeNet取得了与SVM性能相媲美的成果,成为监督学习的主流方法。
总体来看,LeNet(LeNet-5)由两个部分组成:
- 卷积编码器:由两个卷积层组成
- 全连接层密集块:由三个全连接层组成
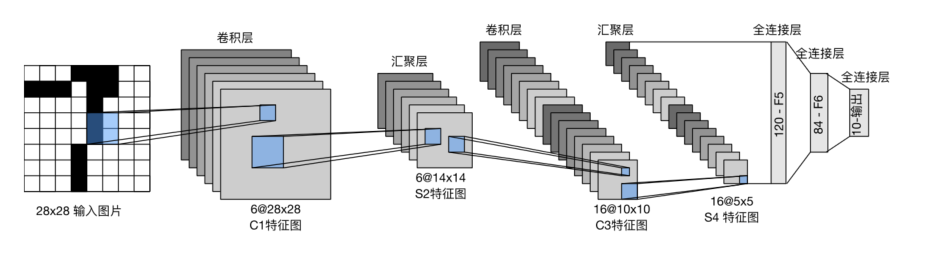
每个卷积块中的基本单元是⼀个卷积层、⼀个sigmoid激活函数和平均汇聚层。
虽然ReLU和最⼤汇聚层更有效,但它们在20世纪90年代还没有出现。
每个卷积层使⽤5 × 5卷积核和⼀个sigmoid激活函数。这些层将输⼊映射到多个⼆维特征输出,通常同时增加通道的数量。第⼀卷积层有6个输出通道,⽽第⼆个卷积层有16个输出通道。每个2 × 2池操作(步骤2)通过空间下采样将维数减少4倍。卷积的输出形状由批量⼤⼩、通道数、⾼度、宽度决定。
为了将卷积块的输出传递给稠密块,我们必须在⼩批量中展平每个样本。换⾔之,我们将这个四维输⼊转换成全连接层所期望的⼆维输⼊。这⾥的⼆维表⽰的第⼀个维度索引⼩批量中的样本,第⼆个维度给出每个样本的平⾯向量表⽰。LeNet的稠密块有三个全连接层,分别有120、84和10个输出。因为我们在执⾏分类任务,所以输出层的10维对应于最后输出结果的数量。
模型搭建
1 | import torch |
1 | net = nn.Sequential( |
我们对原始模型做了⼀点⼩改动,去掉了最后⼀层的⾼斯激活。
打印每层形状
1 | X = torch.rand(size=(1, 1, 28, 28), dtype=torch.float32) |
Conv2d output shape: torch.Size([1, 6, 28, 28])
Sigmoid output shape: torch.Size([1, 6, 28, 28])
AvgPool2d output shape: torch.Size([1, 6, 14, 14])
Conv2d output shape: torch.Size([1, 16, 10, 10])
Sigmoid output shape: torch.Size([1, 16, 10, 10])
AvgPool2d output shape: torch.Size([1, 16, 5, 5])
Flatten output shape: torch.Size([1, 400])
Linear output shape: torch.Size([1, 120])
Sigmoid output shape: torch.Size([1, 120])
Linear output shape: torch.Size([1, 84])
Sigmoid output shape: torch.Size([1, 84])
Linear output shape: torch.Size([1, 10])
模型训练
1 | batch_size = 256 |
为了进⾏评估,我们需要对evaluate_accuracy函数进⾏轻微的修改。由于完整的数据集位于内存中,因此在模型使⽤GPU计算数据集之前,我们需要将其复制到显存中。
1 | def evaluate_accuracy_gpu(net, data_iter, device=None): #@save |
为了使⽤GPU,我们还需要⼀点⼩改动。与train_epoch_ch3不同,在进⾏正向和反向传播之前,我们需要将每⼀⼩批量数据移动到我们指定的设备(例如GPU)上。
1 | #@save |
1 | lr, num_epochs = 0.9, 10 |
loss 0.458, train acc 0.828, test acc 0.808
41692.4 examples/sec on cuda:0
